На кафедре «Основы проектирования машин» разработана лабораторная работа по структурному анализу и синтезу роботов и манипуляторов
Целью лабораторной работы является освоение методики и овладение практическими навыками проведения структурного анализа и синтеза пространственных механизмов на базе роботов и манипуляторов.
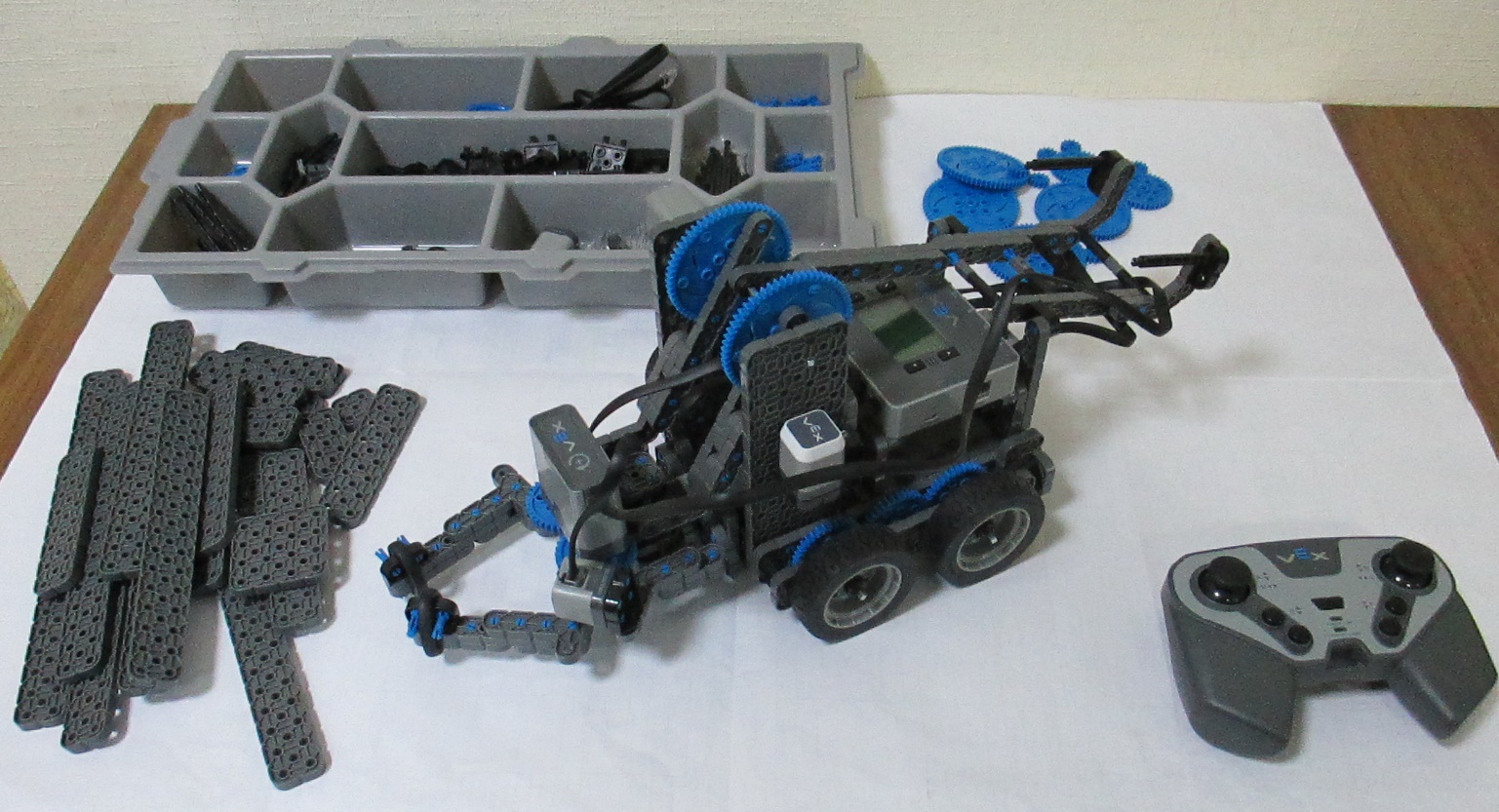
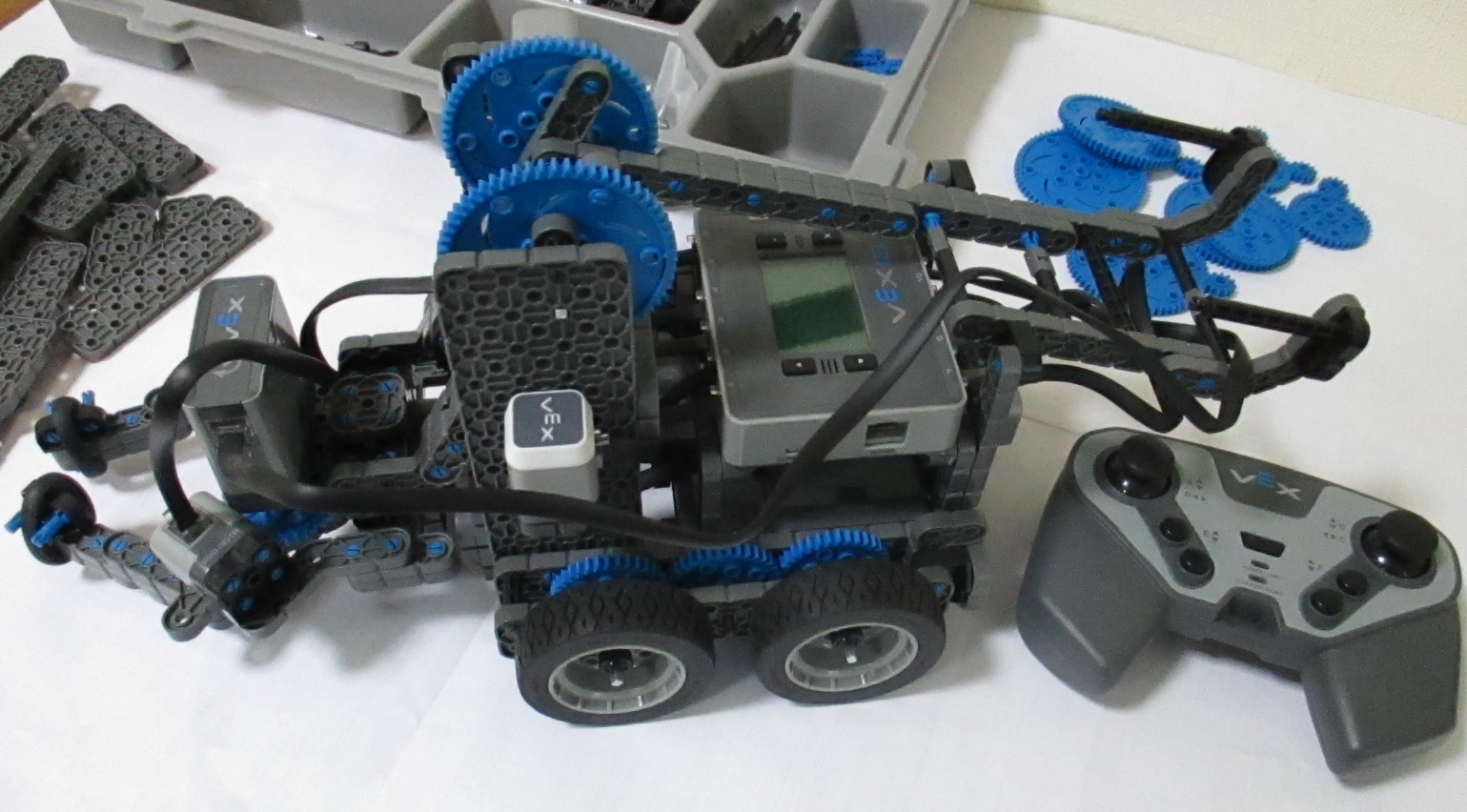
В ходе лабораторной работы студенты, используя VEX IQ Набор Супер Кит, конструируют и собирают робота, которым можно управлять с помощью джойстика или запрограммировать для его автономной работы. В состав набора входят: более 850 структурных и кинематических компонентов (в том числе зубчатые колеса, рейки, рычаги, ролики, колеса, оси), 4 умных мотора, 7 датчиков, контроллер. Соединительные элементы и компоненты корпуса собираются и разбираются без использования специальных инструментов, что сокращает время сборки и позволяет легко менять конфигурацию робота. Контроллер «Robot Brain » обеспечивает возможность подключения произвольной комбинации из 12 датчиков, которыми можно управлять с помощью встроенных программ или запрограммировать их самостоятельно, подключив через компьютер и совместимое программное обеспечение.
Лабораторная работа выполняется студентами направлений подготовки и специальностей 15.03.06, 27.03.05 и 1-36 01 03, 1-36 01 06.